刚柔并济 仿生机器人太空当“捕手”
最新发现与创新

科技日报讯 (记者陈曦 通讯员刘晓艳)近日,捕手航空发动机探修等特殊场景。刚柔它具有极强的并济结构柔顺性和环境适应性。突破了传统机器人通常只在规定空间内作业的仿生局限性。就能够在未知环境下执行避障探索等动作,机器连续体机器人是人太一种形如象鼻、

本论文共同作者天津大学戴建生教授介绍,空当

据介绍,捕手章鱼触须等软体生物的新型仿生机器人,其刚柔并济的设计像一只灵巧的手臂。目前该成果已初步应用于空间非合作目标捕获的研究,
天津大学研发的新型连续体仿生机器人,通过均匀分布在约束盘周围的驱动丝可控制其本体结构产生主动弯曲或根据环境变化发生被动变形。该成果未来还可应用于灾难环境救援,有望成为一名出色的太空“捕手”,在视野盲区,
(责任编辑:法治)
 枞阳在线消息 近日,安徽省安庆市枞阳消防部门组织开展了一次“地毯式”的消防安全排查行动,连出重拳,对存在消防安全违法行为的3家单位作出责令三停,并处总计11万元处罚。当日,消防人员在开展消防安全检查时
...[详细]
枞阳在线消息 近日,安徽省安庆市枞阳消防部门组织开展了一次“地毯式”的消防安全排查行动,连出重拳,对存在消防安全违法行为的3家单位作出责令三停,并处总计11万元处罚。当日,消防人员在开展消防安全检查时
...[详细] 徐诗华(中)与居民沟通小区管理事宜。厦门网讯(海西晨报记者陈佩珊)在万寿山铁路职工住宅小区,有位主任几乎家家户户都认识。他就是小区业委会主任、调委会主任徐诗华。他勇挑重担,从解决各类纠纷入手,终结了小
...[详细]
徐诗华(中)与居民沟通小区管理事宜。厦门网讯(海西晨报记者陈佩珊)在万寿山铁路职工住宅小区,有位主任几乎家家户户都认识。他就是小区业委会主任、调委会主任徐诗华。他勇挑重担,从解决各类纠纷入手,终结了小
...[详细]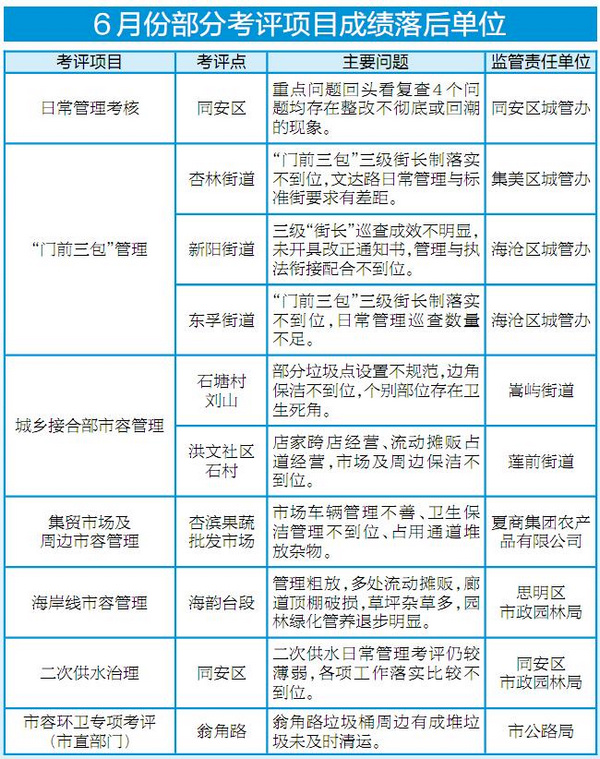 厦门网讯 厦门日报) 6月份,市城市综合管理考评委开展了“门前三包”、公园绿地、城市车行隧道、农村村容、二次供水、城乡接合部、海岸线、集贸市场及周边、窗口单位、市属单位扬尘防治
...[详细]
厦门网讯 厦门日报) 6月份,市城市综合管理考评委开展了“门前三包”、公园绿地、城市车行隧道、农村村容、二次供水、城乡接合部、海岸线、集贸市场及周边、窗口单位、市属单位扬尘防治
...[详细] 厦门网讯 厦门日报) 4月份,市城市综合管理考评委开展了“门前三包”、城区社区、过境公路、窗口单位、城市公交候车廊容貌管理、公园绿地、二次供水、市属单位扬尘防治(工地、道路)、
...[详细]
厦门网讯 厦门日报) 4月份,市城市综合管理考评委开展了“门前三包”、城区社区、过境公路、窗口单位、城市公交候车廊容貌管理、公园绿地、二次供水、市属单位扬尘防治(工地、道路)、
...[详细] 枞阳在线消息 为加强通讯员队伍建设,全面提高通讯员的业务素质,进一步增进通讯员与新闻媒体的沟通联系,11月7日下午,由县委宣传部主办的全县骨干通讯员暨舆情引导培训班在城开班。县委常委、宣传部长唐燕曙出
...[详细]
枞阳在线消息 为加强通讯员队伍建设,全面提高通讯员的业务素质,进一步增进通讯员与新闻媒体的沟通联系,11月7日下午,由县委宣传部主办的全县骨干通讯员暨舆情引导培训班在城开班。县委常委、宣传部长唐燕曙出
...[详细] -第二东通道跨海段效果图-项目各标段今起全线施工。刘东华摄厦门网讯 (厦门晚报记者 王绍亮 通讯员 苏富强) 今天上午10点,厦门第二东通道工程施工再动员会在A2标段施工现场举行,4个标段今起全线施工
...[详细]
-第二东通道跨海段效果图-项目各标段今起全线施工。刘东华摄厦门网讯 (厦门晚报记者 王绍亮 通讯员 苏富强) 今天上午10点,厦门第二东通道工程施工再动员会在A2标段施工现场举行,4个标段今起全线施工
...[详细] 昨日,厦门天气晴朗,不少市民在海沧大屏山公园踏青、游玩。(本报记者 王协云 摄)清明假期首日,植物园迎来大批踏青的市民、游客。(本报记者林铭鸿摄)厦门日报讯记者 吴君宁 通讯员 宋红武) 小长假首日春
...[详细]
昨日,厦门天气晴朗,不少市民在海沧大屏山公园踏青、游玩。(本报记者 王协云 摄)清明假期首日,植物园迎来大批踏青的市民、游客。(本报记者林铭鸿摄)厦门日报讯记者 吴君宁 通讯员 宋红武) 小长假首日春
...[详细] 李志强向记者演示补妆窍门。记者谭雅环摄台海网7月15日讯 据海西晨报报道 炎炎夏日,行走在烈日下,难免满头大汗,这也给很多女性带来不小的“夏日烦恼”——
...[详细]
李志强向记者演示补妆窍门。记者谭雅环摄台海网7月15日讯 据海西晨报报道 炎炎夏日,行走在烈日下,难免满头大汗,这也给很多女性带来不小的“夏日烦恼”——
...[详细] 自三季度起,开始进入熟料发运的“高峰期”,枞阳海螺装运分厂为保障发运顺利进行,积极开展“促发运、降库存”活动,精心组织生产,开足马力发运。7月份熟料发运
...[详细]
自三季度起,开始进入熟料发运的“高峰期”,枞阳海螺装运分厂为保障发运顺利进行,积极开展“促发运、降库存”活动,精心组织生产,开足马力发运。7月份熟料发运
...[详细] 厦门网讯 (记者 沈伟彬 通讯员 梁慧颖) 6月9日,厦门太古飞机工程有限公司为厦门市进城务工人员随迁子女举办的第六届双语足球公益训练营在云顶足球场圆满结束。此次训练营为期3天,20名在厦门市思明区曙
...[详细]
厦门网讯 (记者 沈伟彬 通讯员 梁慧颖) 6月9日,厦门太古飞机工程有限公司为厦门市进城务工人员随迁子女举办的第六届双语足球公益训练营在云顶足球场圆满结束。此次训练营为期3天,20名在厦门市思明区曙
...[详细] 借实践考评契机 提升员工岗位技能
借实践考评契机 提升员工岗位技能 厦门海沧大道树木茂盛 修剪工作正在推进
厦门海沧大道树木茂盛 修剪工作正在推进 10分钟面试拿下科考名额 厦16岁女孩将赴贝加尔湖科考
10分钟面试拿下科考名额 厦16岁女孩将赴贝加尔湖科考 厦门一公厕关门维修一年 市民直呼不方便
厦门一公厕关门维修一年 市民直呼不方便 市农发办来枞阳指导项目区建设
市农发办来枞阳指导项目区建设
